
平衡环 "旅行者平衡环"
在本手册中,我们将展示如何为索尼α5100或类似的摄像机做平衡环。
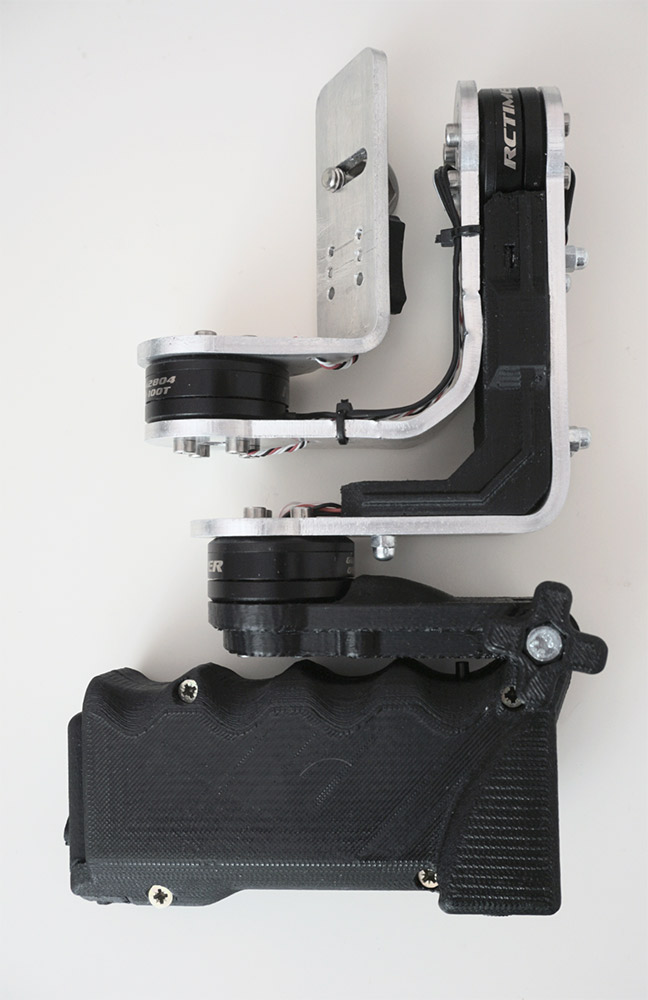
 平衡环概貌
平衡环概貌
这个平衡环的主要优点是体积小、重量轻。平衡环的手柄是可折叠的。它能让你将平衡环携带于一个小袋子或盒子里。当它折叠时尺寸是21×12×5厘米。两个18650电池足够几个小时的操作。
你可以在这个视频中查看平衡环的性能:
以下零件将被用到项目中:
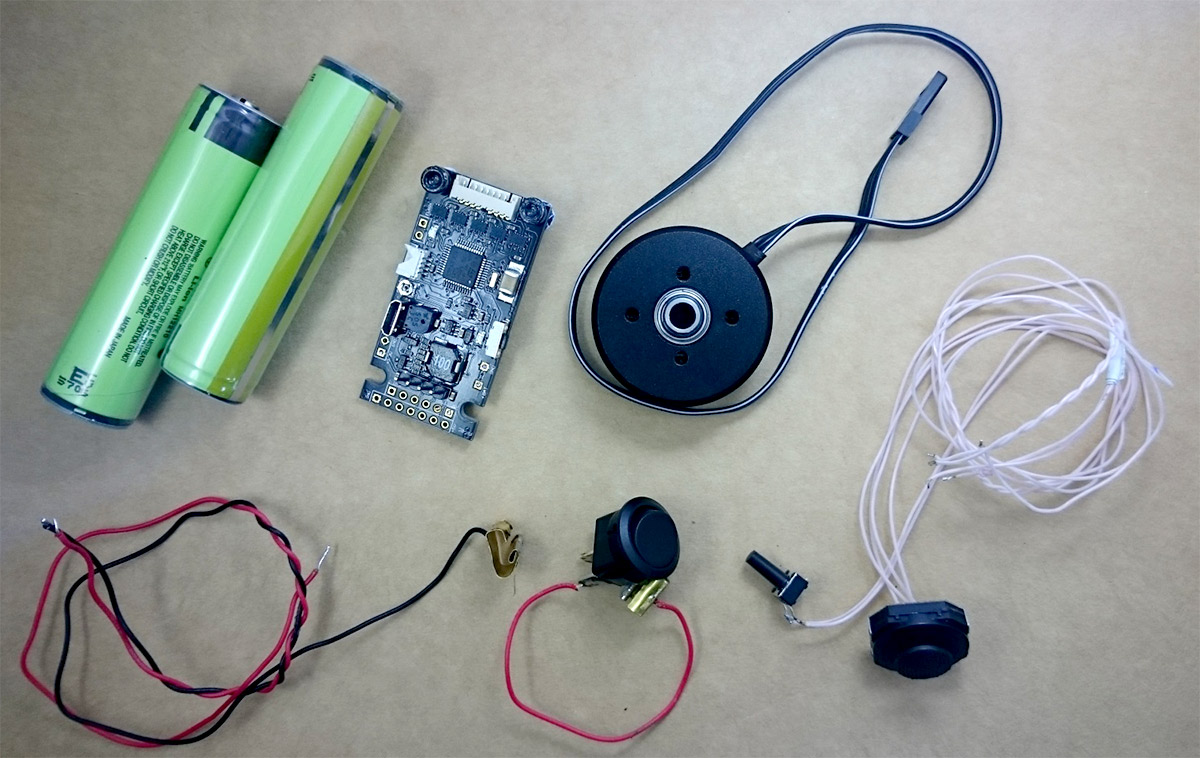
- BaseCam电子的SimpleBGC32控制器。平衡环的身体为Tiny控制器设计,它的尺寸是50×25mm;
- 3个马达Rctimer GBM2804 空心轴无刷平衡环马达。它们的能量对于这个平衡环来说已经足够了。针对更大的摄像机,您会需要更强能量的马达;
- PSP 1000操纵杆;
- 摇杆开关P-SM101-2B3,或类似的;
- 两个受保护的锂电池18650。同样,您也可以使用未受保护的锂电池18650;
- 11 mm长的钉扣;
- M3×12带平顶头机械螺丝 - 4包;
- M3×10带平顶头机械螺丝 - 2包;
- M3×6带插座驱动的按钮头机械螺丝 - 22包;
- M3×8带插座驱动的按钮头机械螺丝 - 4包;
- M5×45六角螺栓和一个带尼龙插件的螺母;
- M3×15带平顶头木螺钉 - 1包 以及M3×20 - 3包;
- 铝合金板3-4mm或铝4-5mm;
- 3D打印和数控机床用以切割铝平衡环的肩部。
平衡环设计
铝结构由3个控制台组成:滚动(ROLL),俯仰(PITCH)和偏航(YAW)。有必要切割铝合金板到3-4mm厚并弯曲。我们使用通常的4mm厚铝。它针对我们的案例已经够硬了。提到的尺寸只适用于带16-50mm镜头索尼α5100套件摄像机。对于不同的摄像机和镜头,控制台部分是不同的。您需要找到所需的尺寸,以获得相对马达轴的理想平衡。在所有三个马达的托架里,我们增加了平衡微调的可能性。
准备好的零件概貌:
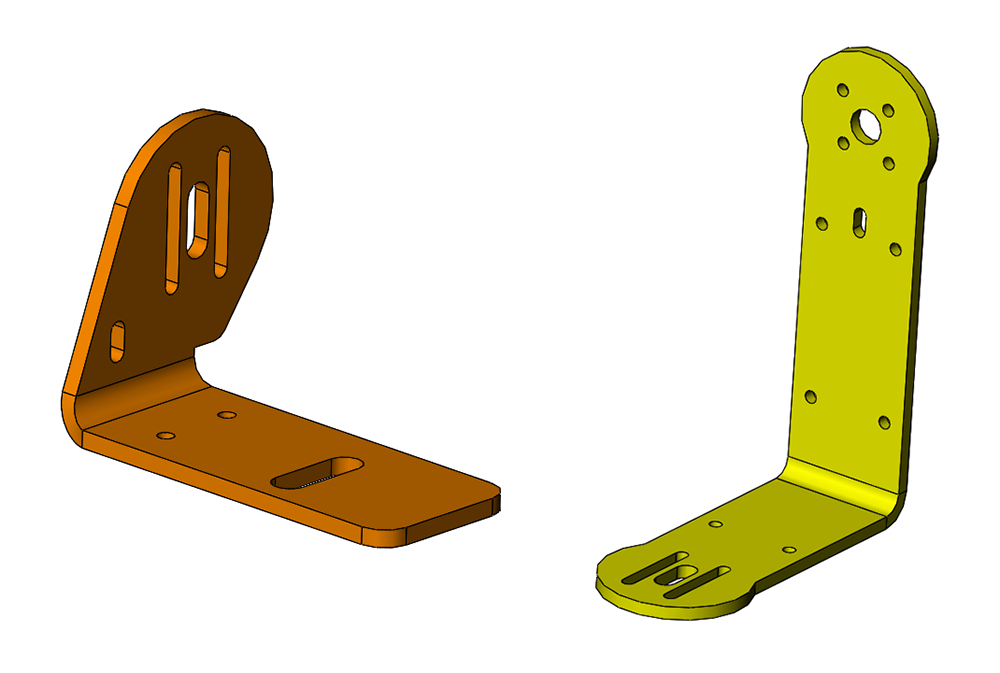 图2. Shoulders Pitch和Yaw应该在90度角处弯曲.
图2. Shoulders Pitch和Yaw应该在90度角处弯曲.
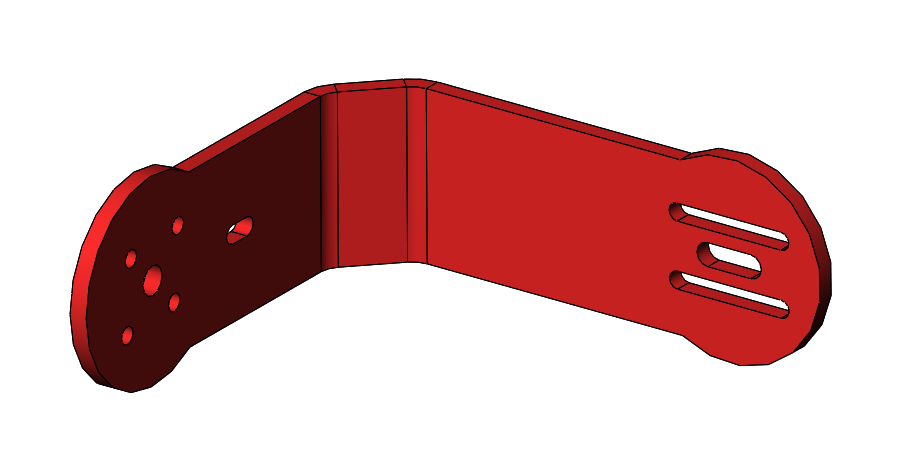 图3. Shoulder Roll应该在45度角处弯曲两点.
图3. Shoulder Roll应该在45度角处弯曲两点.
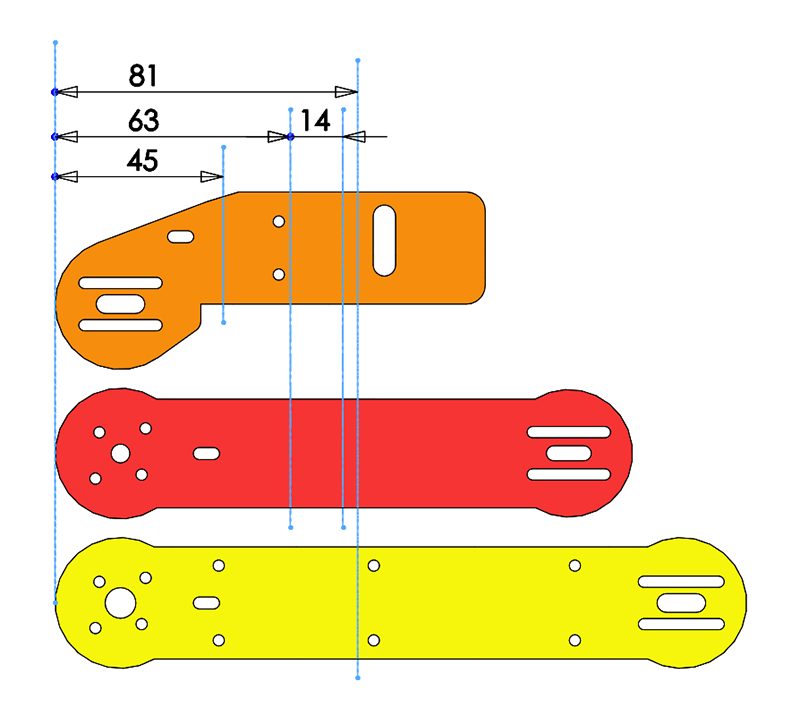 图4. Shoulder弯曲点。
图4. Shoulder弯曲点。
有必要使用数控机床打孔,以便精确地连接零件。
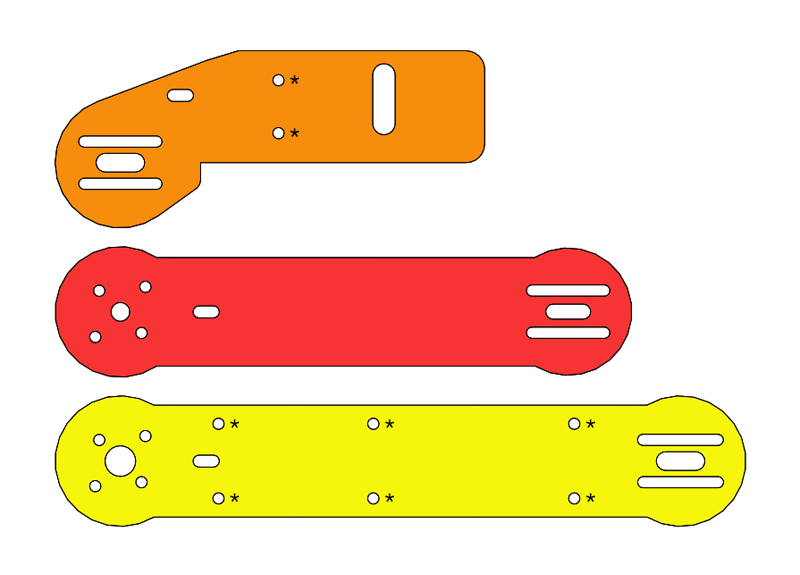 图5. 螺纹孔。
图5. 螺纹孔。
使用CNC在PITCH部分标记2孔(图5)并钻2.5毫米孔和切割M3螺纹用于IMU连接。使用CNC在YAW部分标记2孔(图5)用于Tiny控制器连接。
我们建议你用特殊的工具来折弯零件。如果你没有的话,可以使用老虎钳紧紧的抓住零部件并逐步弯曲它们以避开扭曲的零部件。
铝零件图纸下载。
3D打印零部件
手柄由两部分组成(图6)。我们建议打印他们上面的上部,以获得更好质量的手柄。填充密度应不小于50%。
 图6. 手柄部分概貌。
图6. 手柄部分概貌。
要连接手柄零件,使用M3×20和M3×15木螺钉。
 图7. 安装孔。
图7. 安装孔。
电池室(图8)有带弹簧扣的盖子。要连接按钮,使用马达组带插座驱动的按钮头机械螺丝。
盖子应该有35%的填充密度以便足够坚硬,弹簧扣 - 不少于50%,按钮 - 不少于35%。在内部打印。
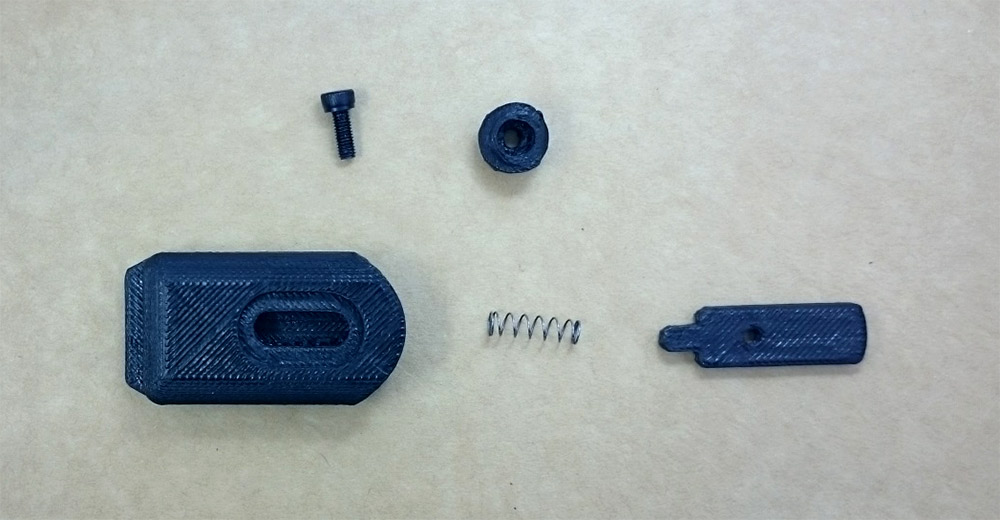 图8. 装配前的盖子。
图8. 装配前的盖子。
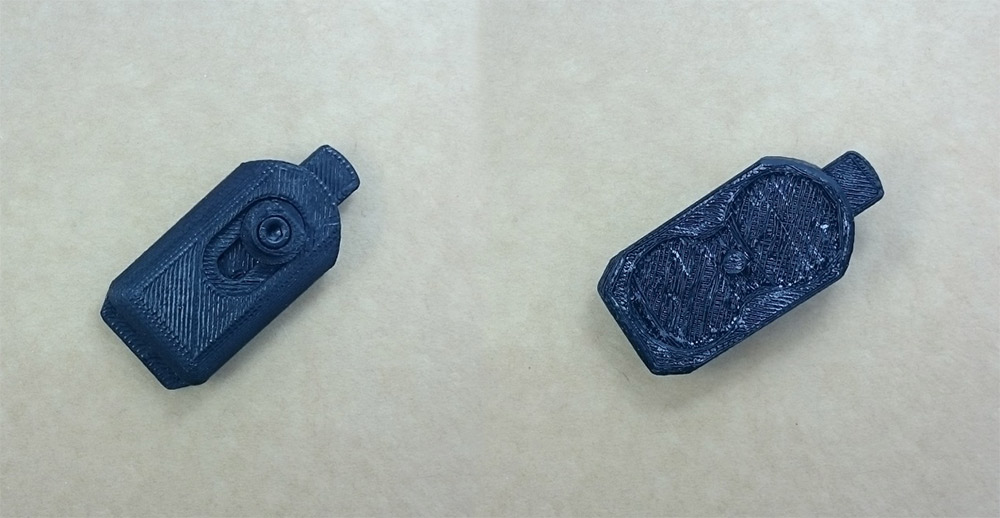 图9. 装配后的盖子。
图9. 装配后的盖子。
要从弹簧管去掉支撑,需使用4,2毫米钻头。钻孔深度为37毫米。你可以从一次性打火机上取下弹簧。共有2个弹簧。你需要更柔软的那个。
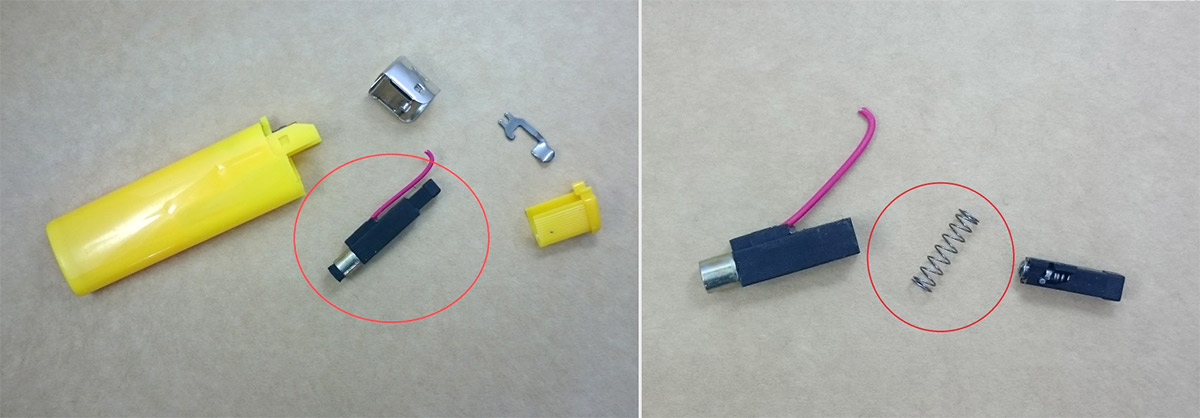 图10. 取弹簧。
图10. 取弹簧。
手柄的活动部分由基础零件和盖子组成。(图11)盖子需要被用于布线。
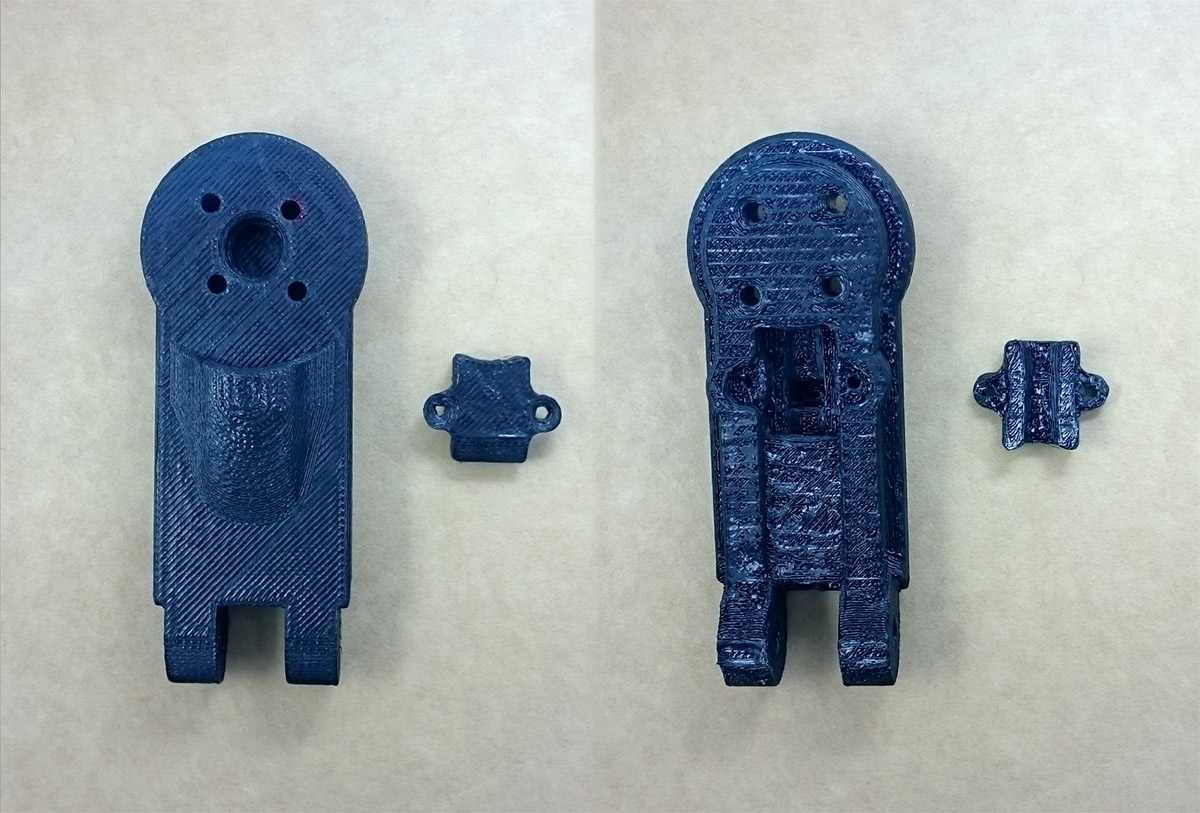 图11. 手柄活动部分概貌。
图11. 手柄活动部分概貌。
盖子可以通过两个M3×15或更短的木螺钉被连接起来。此外,盖子在3D打印层上保持良好。
使用M5×45螺栓与带尼龙插件的M5螺母连接两个部分。拇指螺丝头也应该用3D打印机打印。填充密度不低于60%。
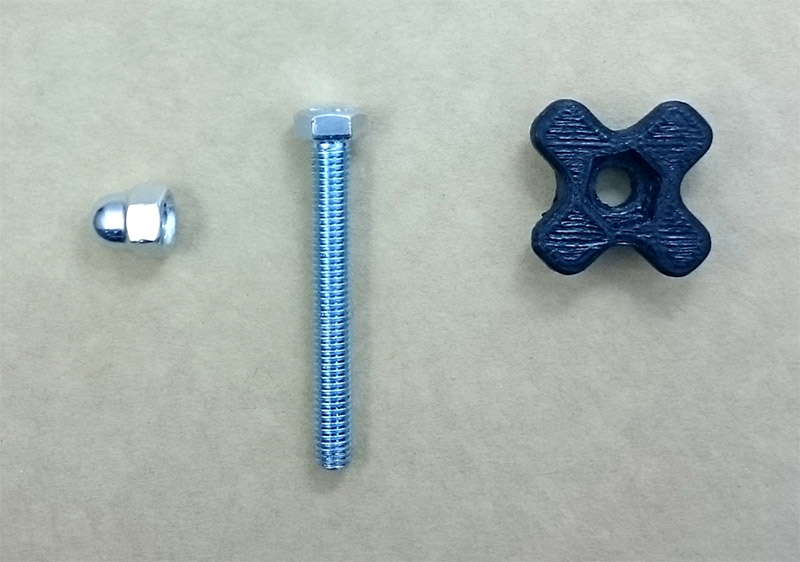 图12. 夹紧零件。
图12. 夹紧零件。
Tiny控制器的安装包括安装零件和盖子(图13)。此外,安装增加了偏航肩的刚度。当盖子闭合时,可以连接USB电缆到控制器上。
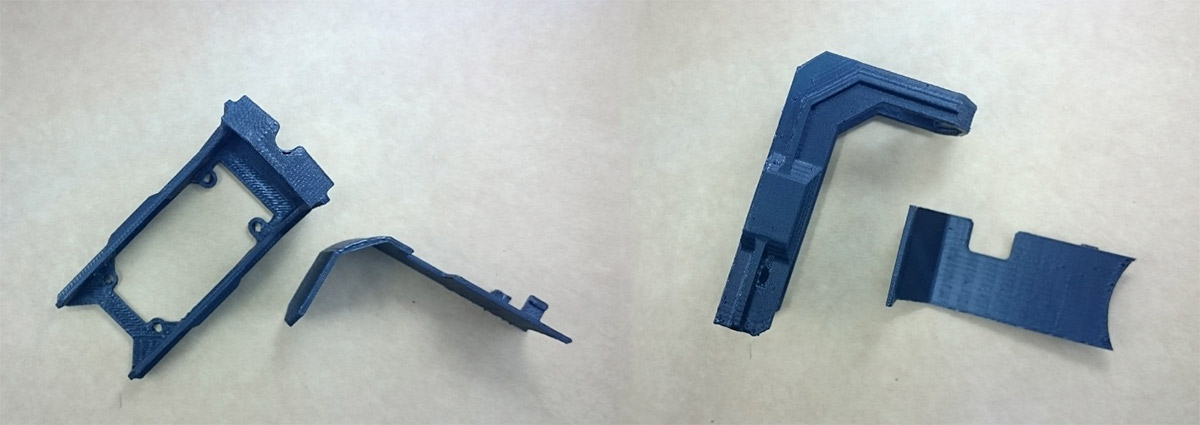 图13. Tiny控制器的安装概貌。
图13. Tiny控制器的安装概貌。
此外,我们建议为IMU打印盖子。有2个选项。
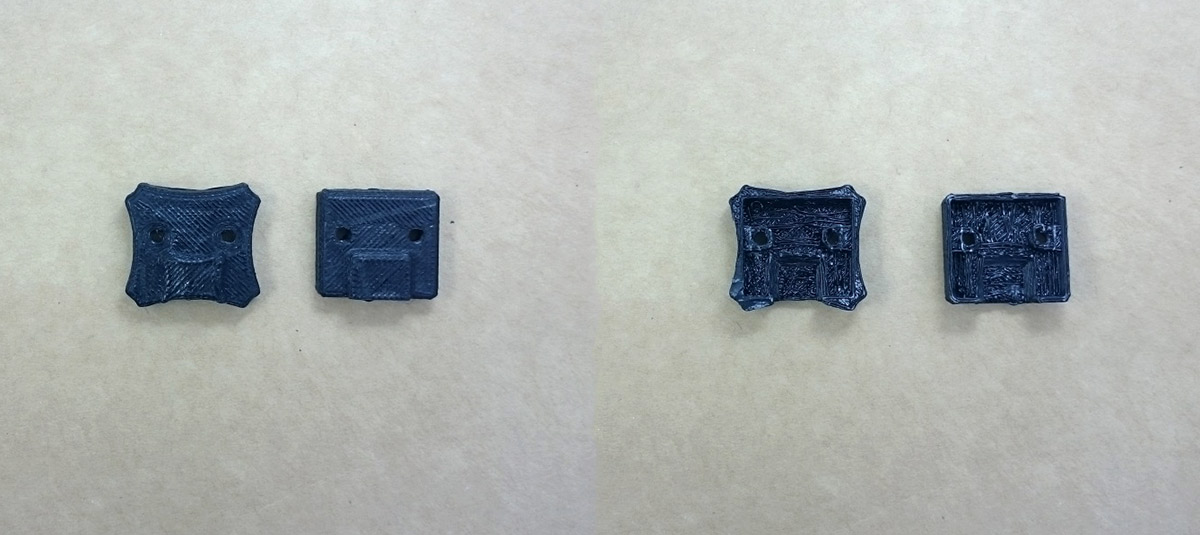 图14. IMU盖子。
图14. IMU盖子。
下载STL模型用以打印。
硬件
PSP操纵杆。焊接柔薄电缆到操纵杆。
摇臂开关。你需要焊接一个20厘米电缆和一个短电缆到摇臂开关上。长电缆直接通往控制器。短电缆应与开关连接。
有必要为来自黄铜板或其他可被焊接材料的电池18650弯曲接触垫。此外,您也可以为它购买可用的弹簧。
如果您自己制作了接触垫,我们建议您将会连接到电池的接触垫部分镀锡。
这是带大小的样板:
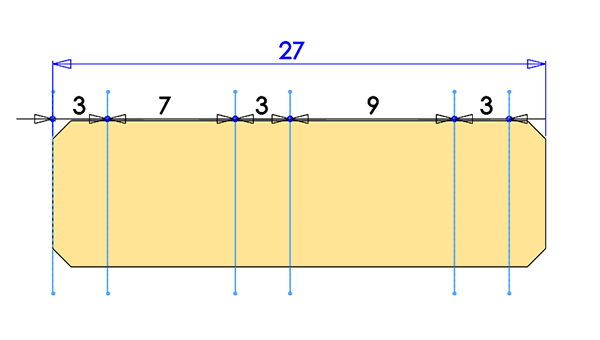 图16. 手柄中电池接触垫的样板。需要两个接触垫用于正负接头。推荐宽度是8毫米。
图16. 手柄中电池接触垫的样板。需要两个接触垫用于正负接头。推荐宽度是8毫米。
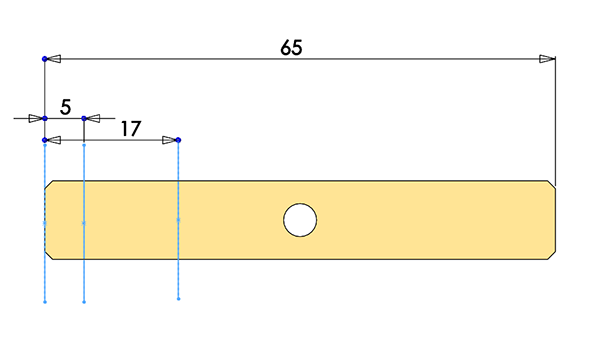 图17. 盖子中电池接触垫的样板。垫子的大小拟与受保护的18650电池一起使用。你只用插入垫子到引脚上的盖子中。该孔应使用4.2毫米钻头来钻。垫子的推荐宽度是10毫米。
图17. 盖子中电池接触垫的样板。垫子的大小拟与受保护的18650电池一起使用。你只用插入垫子到引脚上的盖子中。该孔应使用4.2毫米钻头来钻。垫子的推荐宽度是10毫米。
连接零件与装配
如果你已经正确地准备好了所有的零件,一切都会顺利进行。
使用M3×6螺丝钉连接马达。马达组的螺丝钉因为太长不适合。他们可以靠着马达绕组休息。
安装手柄部份内部的零件。
电池应该被连续的连接。焊接长20厘米的电缆到负接触垫。它将运行到控制器。焊接来自开关的短电缆到正接触垫。进一步运行来自开关的长电缆,它将连接到控制器。检查连接并标记电池极性。安装操纵杆并运行20厘米电缆。
用螺丝钉安装手柄的零部件。
小心地将导线运行到可移动部分。运行马达的导线。用M3×12带平顶头机械螺丝,将马达连接到手柄的可移动部分。关闭盖子。如果你愿意的话,拧紧螺丝钉。
装配盖子。将可移动部件通过按钮与马达组的M3螺栓固定在一起。稍微拧紧,锁定部分可以轻松地在托盘内移动。插入弯曲接触垫。
使用M5*45六角螺栓以及带尼龙插件的螺母将手柄部分连接起来(图12)检查功能。装配时将手柄固定在折叠状态。这将有助于获得当手柄折叠及未折叠时所需的电缆长度。
使用马达及铝件,安装平衡环的顶部。
用M3x6螺钉拧紧马达到铝件。
用盖子关闭IMU并拧紧。
注意!IMU的背面有裸露的接触垫。你应该用绝缘胶带或塑料隔离它们,因为它们与平衡环铝件的偶然接触会同时损坏IMU和控制器。
运行电缆,安装带有马达输出的Tiny控制器。铝表面应该被隔离以避免意外接触。
小心地焊接与连接电子元件与控制器。
在焊接之前,检查电池的能量供应是非常重要的,确保已经将它们安装在合适的地方。
注意!锂离子电池短路是非常危险的。它可以导致电池着火。不要搞混连接的正负极。错误的极性会损坏控制器甚至当它与USB连接时,会损坏你的电脑。
连接平衡环的部件。最后,我们会有一个带可折叠手柄的紧凑型平衡环。
设置
平衡环控制器设置的顺序在用户手册中有描述。在开始设置之前,请确保摄像机平衡良好,马达轴没有摩擦。由于马达功率小,良好的平衡是至关重要的。
设置建议:
- 对于这些马达和电源,将功率设置在100-120间不会导致马达过热。Tiny电板上的电压调节器应被设置为最大电压 - 逆时针旋转到极限。
- 打开Tiny控制器上的Frame IMU是强制性的。在操作过程中,Tiny控制器可以加热到60-70°C。建议你为Frame IMU做温度校准。
- 为2节锂电池设置电池低水平报警,并在低水平时让马达关机可以延长电池寿命。
- 开启降压补偿,因为通过内部调节2节电池,电压并不稳定。
- 指定的输出ADC1,ADC2的操纵杆,YAW和PITCH轴的控制。
- 不同的功能可以被分配到按钮上。例如,它可以切换摄像机控制的不同配置文件。
针对固件2.59b1示例设置文件。
作者
Aleksey Moskalenko: 创意和设置
Andrey Talashenko: 3D建模,打印,组装
Michael Shekhunov: CNC切割